Kalman-Filter zur hochgenauen Positionsschätzung
Die Positionsbestimmung von Fahrzeugen mittels GPS ist heutzutage ein alltäglicher Bestandteil unseres Lebens. Wir verlassen uns auf satellitengestützte Navigation, um uns präzise und zuverlässige Standortinformationen zu liefern. Idealerweise ist die ermittelte Position auf der Erdoberfläche durch GPS Satelliten genau bestimmbar. Die Funksignale, die GPS-Geräte erreichen, sind anfällig für Hindernisse wie Gebäude und atmosphärische Störungen, die sich nachteilig auf die Genauigkeit unserer Positionsbestimmung auswirken können. Dies führt zu unerwünschten Ungenauigkeiten.
| Ideale Bedingungen für GPS Positionsbestimmung | Realität bei der GPS Positionsbestimmung |
|---|---|
 | 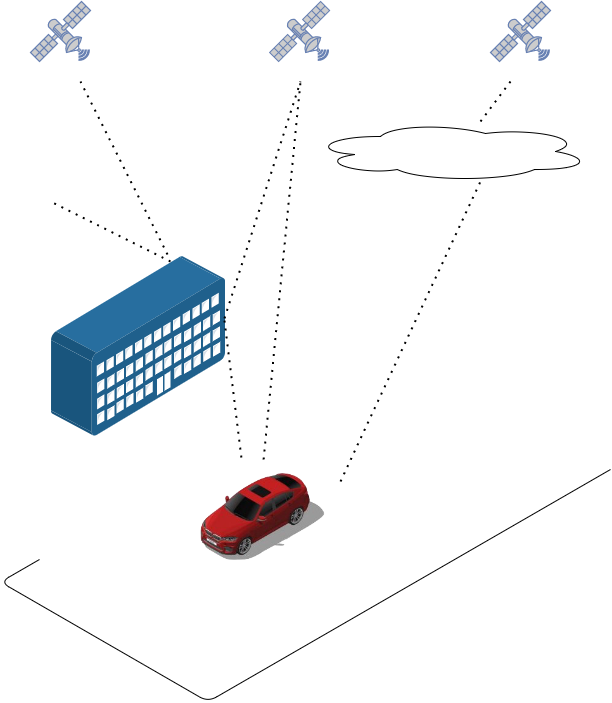 |
Die Bestimmung der Fahrzeugposition allein mit GPS-Signale kann in bestimmten Situationen unzureichend sein.